5. Process Scheduling
14/10/22
Multi-level Feedback Queues
- Defining characteristics of feedback queues include:
- Number of queues
- Scheduling algorithms used for individual queues
- Migration policy between queues
- Initial access to the queues
- Feedback queues are highly configurable and offer significant flexibility
From windows 7 they used multi-level feedback queues.
An interactive system using a preemptive scheduler with two classes and 16 priority levels in each class.
- "Real time" processes/threads have a fixed priority level
- "Variable" processes/threads can have their priorities boosted temporarily
Round robing algorithm is used within the queues.
Priorities are based on the process base priority (between 0-15) and thread base priority.
A threads priority dynamically changes during execution between its base priority and the maximum priority within its class
- Interactive I/O bound processes receive a larger boost
- Boosting priorities prevents priority inversion
Scheduling in Linux
Completely fair scheduler
- Process scheduling has evolved over different Linux versions. This accounts for multiple processors/cores, processor affinity, and load balancing between cores
- Distinguishes between two types of tasks for scheduling:
- Real time tasks (POSIX compliant): real time FIFO tasks, real time Round Robin tasks
- Time sharing tasks using a preemptive approach
- Most recent scheduling in Linux for time sharing tasks is completely fair scheduler
Real time tasks
Real time is the wrong name as you cant guarantee hard deadlines.
- Real time FIFO tasks have the highest priority and are scheduled using FCFS approach, using preemption if a higher priority job shows up
- Real time round robin tasks are preemptable for clock interrupts and have a time slice associated with them
- Both approaches cannot guarantee hard deadlines
Time scheduling in Linux
Equal priority
- The CFS devices the CPU time between all processes/threads
- If all N processes/threads have the same priority:
- They will be allocated a 'time slice' equal to 1/N times the CPU time
- Length of the time slice and the "available CPU time" are based on the targeted latency.
- If N is very large the context switch time will be dominant, hence a lower bound on the time slice is impose by the minimum granularity.
Different Priority
- A weighting scheme is used to take different priorities into account
- If process/threads have different priorities:
- Every thread i is allocated a weight w that reflects its priority
- The tasks with the lowest proportional amount of used cpu time are selected first
Multi-processor Scheduling
Scheduling Queues
- Single processor machine: which process(thread) to run next
- Scheduling decisions on a multi-processors/core machine include
Shared Queues
- A single or multi-level queues shared between all CPUs
- Advantage:
- Automatic load balancing
- Disadvantage:
- Contention for the queues
- Does not account for processor affinity (cache becomes invalid when moving to a different CPU)
- Windows will allocate the highest priority threads to the individual CPUs/cores
Private Queues
- Each CPU has a private (set) of queues
- Advantages:
- CPU affinity is automatically satisfied
- Contention for shared queues is minimised
- Disadvantages:
- Less load balancing
- Push and pull migration between CPU is required
Related vs. Unrelated Threads
- Related: multiple threads that communicate with one another and ideally run together (search algorithm)
- Unrelated: processes threads that are independent, possibly started by different users running different programs
Scheduling Related Threads
Working together
- Threads belong to the same process and are cooperating (exchange messages or share information)
- They try to send messages to the other threads, which are still in the ready state
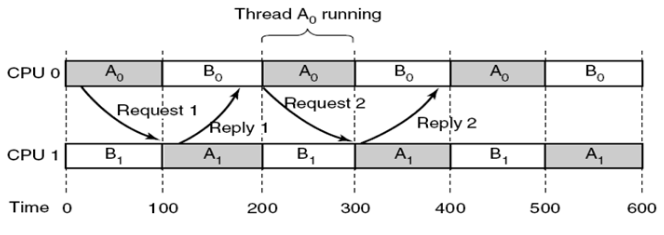
- The aim is to get threads running, as much as possible, at the same time across multiple CPUs
Space Scheduling
- Approach:
- N threads are allocated to N dedicated CPUs
- N threads are kept waiting until N CPUs are available
- Non-preemptive
- Number of N can be dynamically adjusted to match processor capacity
Gang Scheduling
- Time slices are synchronised and the scheduler groups thread together to run simultaneously
- A preemptive algorithm
- Blocking threads result in idle CPUs
- If a thread blocks, due to an I/O call, the rest of the time slice will be unused