15. Maps - Using binary search trees
24/03/23
Note intended to help with coding
- Global view of tree
- Can look at entire tree in one go
- Human seeing a picture of a (small) tree
- Local view of tree
- What your code sees: "code perspective"
- Code generally only sees a local portion of a tree and must work with that
Binary Search
- Search for an element within a sorted array is fast
- Array to be searched is halved at each iteration, hence
- Only works because of the step of knowing whether to go left or right
- But arrays suffer from being slow, , to insert new elements. As needs to shift elements to make room for them
- Search trees attempt to fix the inefficiency of insertion whilst keeping good properties of binary search
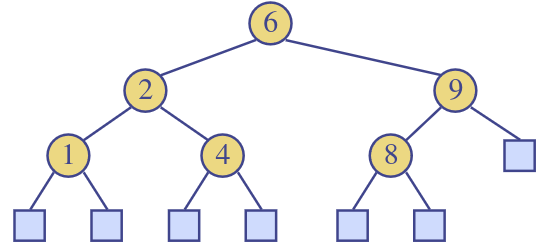
Binary Search Trees
- Binary search tree is a binary tree storing key-value entries at its internal nodes and satisfying the following "search tree" property:
- Let , , and be any three nodes such that is in the left subtree of and is in the right subtree of ;
- External nodes do not store items, and likely are not actually implemented, but are just null links from the parent
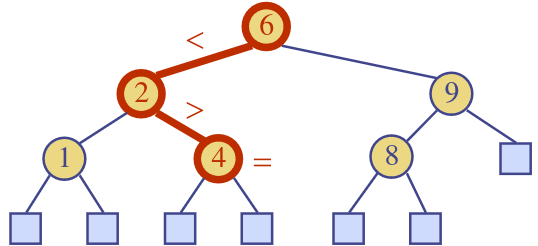
Search
- To search for the key , trace a downward path starting at the root
- The next node visited depends on the outcome of the comparison of with the key of the current node
- If we reach a leaf, the key is not found and we return null
Recursive vs. Iterative
- Recursive programs are easier to implement, but less efficient because of the overhead of a function call
- For best efficiency, will need to convert to an iterative program
while (test) {...}
Fundamental property of search tree - An inorder traversal of a (binary) search trees visits the keys in increase order. To access the minimum key, just need to 'always go left'
Insertion
- Insert where a
get(k)would find it. - If is already in tree then just replace the value, otherwise, is not already in the tree, and let be the leaf reached by the search
Deletion
- We remove from the tree and connect it to the parent. Still works if is a right child and has a left child
- For removing one with two children:
- Find the internal node that follows in an inorder traversal
- Copy into node
- Remove node and its left child (must be a leaf) by means of same procedure as before for one child
Balanced Trees
- Binary search trees: if all levels filled, then search, insertion and deletion are
- However performance may deteriorate to linear if nodes are inserted in order
Performance
- Binary search tree of height with items. The space used is . Methods take
- The height is in the worst case and in the best case
Self-Balancing
- Constantly re-structure of trees:
- Keep the trees height balanced so that the height is logarithmic in the size
- Performance always logarithmic
Issues
.....